
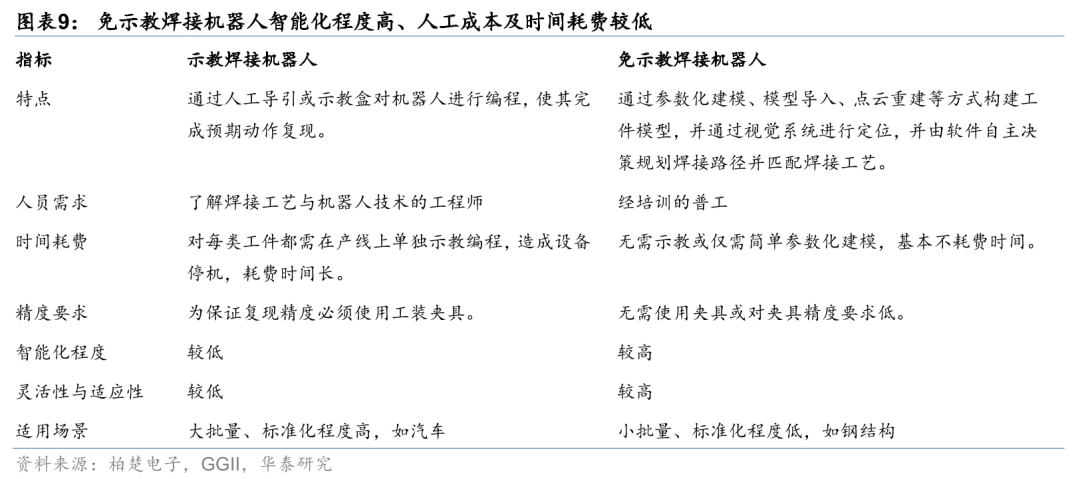
焊接机器人从示教“进化”为免示教,更适用于非标场景。传统的示教焊接机器人依赖人工导引或示教盒对机器人进行编程,使其完成预期动作复现。而免示教焊接机器人在构建工件模型后通过视觉系统对工件与焊缝进行定位(类似人的“双眼”),并由免示教软件系统自主决策规划焊接路径并匹配焊接工艺(类似人的“大脑”),减少人工示教编程的时间成本及人员耗费。免示教机器人对工件种类、摆放位置等要求较低,灵活性、适应性及智能化程度较高,与非标件的柔性生产场景适配度较高。在“机器替人”大背景下,免示教焊接机器人在钢构、船舶等领域的应用是大势所趋。
视觉系统进步加速应用落地,未来尚有较多可提升空间
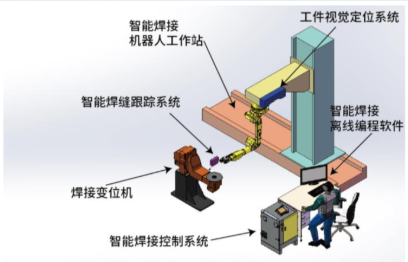
免示教智能焊接系统分为软件与硬件两个部分。
软件部分:①免示教焊接软件:通过参数化编程、模型导入、点云重建等方式构建工件与焊缝模型,同时系统自动生成焊接路径、匹配焊接工艺,在仿真模拟焊接并检查路径合法性后,系统将焊接任务发送给焊接控制系统执行。②视觉系统:包括工件视觉定位系统(含线扫相机)及智能焊缝跟踪系统(含3D结构光相机或线激光相机)。前者为焊接机器人提供宏观视觉定位与匹配,降低对工件摆放位置的要求;后者提供精确的微观视觉,精准探测焊缝空间位置以配合焊接系统进行跟踪焊接,同时还可分析焊缝几何变形情况并匹配工艺,实现非标件柔性加工。③控制系统:经免示教软件及视觉系统规划焊接路线后,通过集中控制机器人工作站、焊接变位机等设备实现工件智能自动焊接。
硬件部分:机器人工作站是进行焊接的执行机构,包括①机器人本体(含技术难度较低的焊接枪、送丝机等)、②焊接电源,控制焊接中的电流、电压等参数,保证焊接质量。除此之外还包括③外部轴机构等,提升机器人活动范围,其中包括行走机构(如地轨、龙门架等)。此外焊接变位机能够一定范围移动和翻转工件,实现连续焊接,增加机器人可达性,提升自动化程度,提高生产效率。
免示教智能焊接机器人从软件层面实现了基本效率问题,提高了机器替人的比例。
服务热线
17312721888联系人:罗经理
邮箱:18021552752@163.com
地址:无锡市江阴市夏港镇景联路38号





 苏公网安备32028102002547
苏公网安备32028102002547